W mojej serii filmów i artykułów o arduino staram się inaczej niż wszyscy tłumaczyć krok po kroku wszystkie etapy budowy konkretnych rozwiązań, tak aby nawet początkujący mógł sobie coś zbudować, udostępniam także gotowce. W tym artykule prezentuję wam prosty czujnik ruchu, który można wykorzystać np. jako czujkę alarmową domu, albo też oświetlenie ogrodowe, pomysłów jest wiele ponieważ projekt oparty o przekaźnik 230 volt a więc wszystko zależy od waszej pomysłowości, jak można ten projekt rozbudować bardziej.

Sterowanie długością czasu włączenia oraz czułością czujnika odbywa się poprzez wbudowane potencjometry, możemy też sterować czasem pomiędzy wyłączeniem się czujnika a ponownym jego załączeniem, tak by mieć np. czas na uruchomieniu czujnika i opuszczenie pomieszczenia lub miejsca monitorującego - te parametry znajdują się w sketchu. No więc zaczynamy

Gotowiec do pobrania:
https://drive.google.com/open?id=1LWUOXvNGtNi2s0b4fidw0X50O0Pts1Lj

Sterowanie długością czasu włączenia oraz czułością czujnika odbywa się poprzez wbudowane potencjometry, możemy też sterować czasem pomiędzy wyłączeniem się czujnika a ponownym jego załączeniem, tak by mieć np. czas na uruchomieniu czujnika i opuszczenie pomieszczenia lub miejsca monitorującego - te parametry znajdują się w sketchu. No więc zaczynamy
Co potrzebujemy?
Oczywiście wszystko to co w poprzednich artykułach prezentowaliśmy, a także kolejny nowy moduł, czyli:
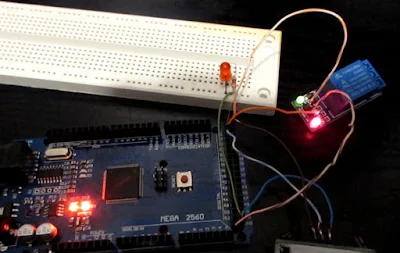
- moduł ATMEGA 2560
- przekaźnik 1 kanałowy
- oraz czujnik ruchu PIR-HC-SR501
Czujnik do kupienia np. tutaj:
lub tutaj:
Wszystko składamy według tego schematu:

Gotowy efekt:

Gotowy sketch do wgrania:
/*
* //////////////////////////////////////////////////
* //making sense of the Parallax PIR sensor's output
* //////////////////////////////////////////////////
*
* Switches a LED according to the state of the sensors output pin.
* Determines the beginning and end of continuous motion sequences.
*
* @author: Kristian Gohlke / krigoo (_) gmail (_) com / http://krx.at
* @date: 3. September 2006
*
* kr1 (cleft) 2006
* released under a creative commons "Attribution-NonCommercial-ShareAlike 2.0" license
* http://creativecommons.org/licenses/by-nc-sa/2.0/de/
*
*
* The Parallax PIR Sensor is an easy to use digital infrared motion sensor module.
* (http://www.parallax.com/detail.asp?product_id=555-28027)
*
* The sensor's output pin goes to HIGH if motion is present.
* However, even if motion is present it goes to LOW from time to time,
* which might give the impression no motion is present.
* This program deals with this issue by ignoring LOW-phases shorter than a given time,
* assuming continuous motion is present during these phases.
*
*/
// 5V left
// out midle
// gnd right
// connectors on bottom
/*
--------------------
| |
| |
| |
| o o o |
| 5V o GND |
--------------------
*/
/////////////////////////////
// voltage 4,5-20V
//
//VARS
//the time we give the sensor to calibrate (10-60 secs according to the datasheet)
int calibrationTime = 10;
//the time when the sensor outputs a low impulse
long unsigned int lowIn;
//the amount of milliseconds the sensor has to be low
//before we assume all motion has stopped
long unsigned int pause = 5000;
boolean lockLow = true;
boolean takeLowTime;
int pirPin = 24; //the digital pin connected to the PIR sensor's output
int ledPin = 22;
/////////////////////////////
//SETUP
void setup(){
Serial.begin(9600);
pinMode(pirPin, INPUT);
pinMode(ledPin, OUTPUT);
digitalWrite(pirPin, LOW);
//give the sensor some time to calibrate
Serial.print("calibrating sensor ");
for(int i = 0; i < calibrationTime; i++){
Serial.print(".");
delay(1000);
}
Serial.println(" done");
Serial.println("SENSOR ACTIVE");
delay(50);
}
////////////////////////////
//LOOP
void loop(){
if(digitalRead(pirPin) == HIGH){
digitalWrite(ledPin, HIGH); //the led visualizes the sensors output pin state
if(lockLow){
//makes sure we wait for a transition to LOW before any further output is made:
lockLow = false;
Serial.println("---");
Serial.print("motion detected at ");
Serial.print(millis()/100);
Serial.println(" sec");
delay(50);
}
takeLowTime = true;
}
if(digitalRead(pirPin) == LOW){
digitalWrite(ledPin, LOW); //the led visualizes the sensors output pin state
if(takeLowTime){
lowIn = millis(); //save the time of the transition from high to LOW
takeLowTime = false; //make sure this is only done at the start of a LOW phase
}
//if the sensor is low for more than the given pause,
//we assume that no more motion is going to happen
if(!lockLow && millis() - lowIn > pause){
//makes sure this block of code is only executed again after
//a new motion sequence has been detected
lockLow = true;
Serial.print("motion ended at "); //output
Serial.print((millis() - pause)/500);
Serial.println(" sec");
delay(50);
}
}
}
Gotowiec do pobrania:
https://drive.google.com/open?id=1LWUOXvNGtNi2s0b4fidw0X50O0Pts1Lj